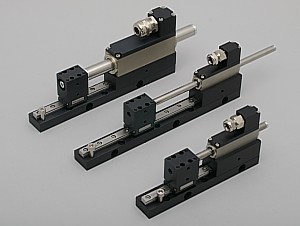
QuickDynamic® Linear Motor Modules
Overview
QuickDynamic® stands for high-dynamic mechanical data.
With our QuickDynamic® series, we offer miniature, high-dynamic linear motor moduels based on QuickShaft® servo drives. The specified standard values for continuous opperations are 5 m/s and 150 m/s². We also offer ready-to-use guide systems, positioning controllers, customized motor cables and supply units with the compotens.
For easy integration into customer applications, we deliver examples of circut drawings, accordingly ready configurated positiong controllers, emergency-stop concepts, as well as licence-free software tools.
Applications:
|
|
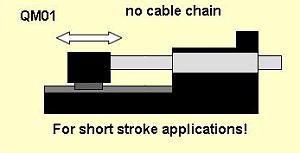
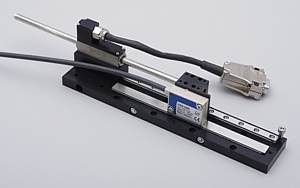
QuickDynamic® Linear Motor Modules QM01 - The Mini Sprinters
Characteristics:
- QuickShaft® linear servo drives integrated
- ideal for short stroke applications
- stroke up to 120 mm
- peak force up to 28 N
- speed up to 5 m/s
- max. acceleration 150 m/s²
- very low moving masses
- very thin construction
- long operational life
- positioning repeatability +/- 0,05 mm
- one-cable technology
Options:
- external sensor with 1 micron resolution
Faulhaber® Positioning Controller

In very simple and low dynamic applications we preferably use controllers out of the Faulhaber® range in combination with our QuickDynamic® linear motor modules.
Characteristics:
- 24 VDC logic supply
- 24 VDC or 48 VDC power supply
- 2 - 5 A output current
- analog position target 0 - 10 V
- fieldbusses EtherCAT, CANOpen, RS232
- licence-free configuration tool MotionManager
- controller configuration according to motor and application data
LinMot® Positioning Controller

In high dynamic applications and when fieldbusses are required we preferably use controllers out of the LinMot® range in combination with our QuickDynamic® linear motor modules.
Characteristics:
- 24 VDC logic supply
- 48 - 72 VDC power supply
- 8 - 32 A output current
- selection of positioning tasks with freely definable motion profiles over I/O’s or fieldbusses
- oscillating motion
- analog position target 0 - 10 V
- pulse & direction inputs
- master-booster or gantry mode
- master-encoder synchronization
- streaming mode
- input for external high-resolution positioning sensor
- variable homing modes
- Safe Torque Off (STO)
- fieldbusses EtherCAT, POWERLINK, PROFINET, SERCOS III, TCP/IP, Profibus-DP, CANOpen, DeviceNet
- licence-free configuration tool LinMot-Talk
- controller configuration according to motor and application data

QuickDynamic® - Download Center
Brochures & Data Sheets
> QuickDynamic® & QuickShaft® overview
> QuickDynamic® QM01 data sheet
Installation, Maintenance & EC Guidelines
> Installation guide, maintenance instructions & declaration of conformity - QM01-1247 & QM01-2070
Copyrights
Our texts, images, graphics, videos and sounds are subject to the protection of international copyright laws! For trademarks of others, see our copyrights.