ParaPicker® Pick&Place
Overview
ParaPicker® PP02 are super-dynamic, dual-axis, parallel kinematic Pick&Place systems with linear drives.
♦ the history
In 2005 we developed a dual-axis, parallel kinematics robot, which used linear direct drives as actuators. Back then, our parallel-kinematic CF rod design already showed the industrial standards of today.
This was the begining of our ParaPicker® technology!
ParaPicker® PP02 Pick&Place are the development to the industrial product and are based on our established HighDynamic® linear motor modules. In 2013 PP02 was first introduced at the MOTEK fair in Stuttgart.
See the presentation on the right.
♦ the name
- Para stands for the parallel arrangement of the actuators
- Picker stands for the typical tasks
♦ the advantages
- the dynamics in Z-axis direction
- the force in X-axis direction
- very slim design
- no moving cables
- low reaction forces & vibration
- the price
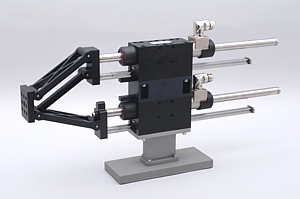
ParaPicker® Pick&Place PP02-23x160
Characteristics:
- dual-axis parallel kinematics Pick&Place system
- 137 N peakforce per actuator
- width only 44 mm
- built with standard HighDynamic® linear motor modules
- typ. work surface in X-Z 150 x 80 mm
- typ. speed 3 m/s
- typ. acceleration 50 m/s²
- typ. payload up to 500 grams
- all joints & ball carriages sealed
- positioning repeatability +/- 0,3 mm
- one cable technology
- suitable positioning controller from LinMot® range
- connection to all major controls e.g. over parallel I/O, CANopen, Profibus-DP, Ethernet TCP/IP, EtherCAT, PofiNet, PowerLink oder SERCOS III is possible
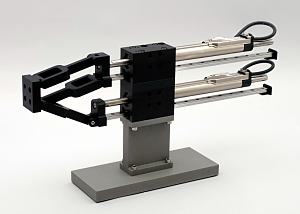
ParaPicker® Pick&Place PP02-37x120
Characteristics:
- dual-axis parallel kinematics Pick&Place systems
- 255 N peak force per actuator
- width only 60 mm
- built with standard HighDynamic® linear motor modules
- typ. work surface in X-Z 240 x 90 mm
- typ. speed 3 m/s
- typ. acceleration 50 m/s²
- typ. payload up to 2.000 grams
- all joints & ball carriages sealed
- positioning repeatability +/- 0,3 mm
- one-cable technology
- suitable positioning controller from our LinMot® range
- connection to all major controls e.g. over parallel I/O, CANopen, Profibus-DP, Ethernet TCP/IP, EtherCAT, PofiNet, PowerLink oder SERCOS III is possible
Options
- linear motors with wipers for rough environments (only PP02-37)
- special wipers for environments with very fine dust (only with PP02-37)
- linear guides with reinforced wipers
- more efficient design with our HighDynamic® 48er-modules
- pneumatic brake for vertical applications
- MagSpring® adaptor for weight force compensation in vertical applications
ParaPicker® Positioning Controller

For our Parapicker® Pick&Place systems, we preferably use controllers out of the LinMot® range.
Characteristics:
- 24 VDC logic supply
- 48 - 72 VDC power supply
- 8 - 32 A output current
- selection of positioning tasks with freely definable motion profiles over I/O’s or fieldbusses
- oscillating motion
- analog position target 0 - 10 V
- pulse & direction inputs
- master-booster or gantry mode
- master-encoder synchronization
- streaming mode
- input for external high-resolution positioning sensor
- variable homing modes
- Safe Torque Off (STO)
- fieldbusses EtherCAT, POWERLINK, PROFINET, SERCOS III, TCP/IP, Profibus-DP, CANOpen, DeviceNet
- licence-free configuration tool LinMot-Talk
- controller configuration according to motor and application data

ParaPicker® Pick&Placer - Download Center
Brochures & Data Sheets
> ParaPicker® Pick&Place overview
> ParaPicker® PP02-23 data sheet
> ParaPicker® PP02-37 data sheet
Installation, Maintenance & EC Guidelines
> Installation guide, maintenance instructions & declaration of conformity - PP02-23
> Installation guide, maintenance instructions & declaration of conformity - PP02-37
Copyrights
Our texts, images, graphics, videos and sounds are subject to the protection of international copyright laws! For trademarks of others, see our copyrights.