ParaPicker® Pick&Place
Übersicht
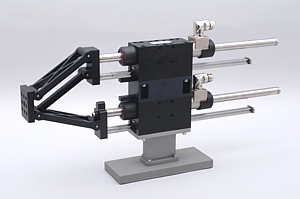
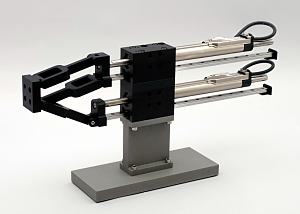
ParaPicker® PP02 sind super dynamische 2-achsige Parallelkinematik Pick&Place Einheiten mit linearer Direktantriebstechnik.
♦ die Historie
2005 wurde als Studie ein 2-achsiger Parallelkinematik-Roboter von uns vorgestellt, bei dem Linearmotoren als Aktuatoren eingesetzt waren. Damals zeigte die Hebelkinematik in CFK-Stabbauweise bereits den heutigen industriellen Stand auf!
Dies war die Geburtsstunde unserer ParaPicker® Technologie!
ParaPicker® PP02 Pick&Place sind die Weiterentwicklung zum Industrieprodukt und basieren auf unseren bewährten HighDynamic® Linearmotor-Modulen. PP02 wurde 2013 erstmals in Stuttgart auf der MOTEK vorgestellt.
Siehe hierzu die Präsentation rechts!
♦ der Name
- Para steht für die parallele Aktuatoranordnung
- Picker steht für die typ. Aufgabenstellung
♦ die Vorteile
- die Dynamik in der Z-Achse
- die Kraft in der X-Achse
- sehr schmal bauend
- keine bewegten Kabel für die Antriebe
- kleine Reaktionskräfte u. geringe Vibration
- der Preis
ParaPicker® Pick&Place PP02-23x160
Produkteigenschaften:
- zweiachsiger Parallelkinematik-Pick&Place
- 137 N Spitzenkraft je Aktuator
- nur 44 mm breit
- aufgebaut mit standard HighDynamic® Linearmotor-Modulen
- typ. Arbeitsfläche in X-Z-Richtung 150 x 80 mm
- typ. Vorschubgeschwindigkeit 3 m/s
- typ. Beschleunigung 50 m/s²
- typ. Nutzlast bis 500 Gramm
- Positionierwiederholgenauigkeit +/- 0,3 mm
- Antriebe in Einkabel-Technologie
- passende Positioniercontroller aus unserem LinMot® Programm
- Anbindung an alle gängigen Steuerungen z.B. über parallel I/O, CANopen, Profibus-DP, Ethernet TCP/IP, EtherCAT, PofiNet, PowerLink oder SERCOS III ist möglich
ParaPicker® Pick&Place PP02-37x120
Produkteigenschaften:
- zweiachsiger Parallelkinematik-Pick&Place
- 255 N Spitzenkraft je Aktuator
- nur 60 mm breit
- aufgebaut mit standard HighDynamic® Linearmotor-Modulen
- typ. Arbeitsfläche in X-Z-Richtung 240 x 90 mm
- typ. Vorschubgeschwindigkeit 3 m/s
- typ. Beschleunigung 50 m/s²
- typ. Nutzlast bis 2.000 Gramm
- alle Gelenke und Führungswagen abgedichtet
- Positionierwiederholgenauigkeit +/- 0,3 mm
- Antriebe in Einkabel-Technologie
- passende Positioniercontroller aus unserem LinMot® Programm
- Anbindung an alle gängigen Steuerungen z.B. über parallel I/O, CANopen, Profibus-DP, Ethernet TCP/IP, EtherCAT, ProfiNet, PowerLink oder SERCOS III ist möglich
Lieferbare Optionen
- Linearmotoren mit Abstreifer für rauhe Umgebungsbedingungen (nur bei PP02-37)
- Linearmotor-Spezialabstreifer für Umgebungen mit Stäuben (nur bei PP02-37)
- Linearführungen mit verstärkten Abstreifern
- leistungsstärkere Ausführung mit unseren HighDynamic® 48er-Modulen
- pneumatisch betätigte Haltebremse bei vertikaler Anwendung
- MagSpring® Anbau zur Gewichtskraftkompensation bei vertikaler Anwendung
ParaPicker® Positioniercontroller

Als Positioniercontroller für unsere Parapicker® Pick&Place verwenden wir Controller aus dem LinMot® Programm.
Produkteigenschaften:
- 24 VDC Logikversorgung
- 48 - 72 VDC Leistungsversorgung
- 8 - 32 A Ausgangsstrom
- Anwahl von Positionieraufträgen mit frei definierbaren Verfahrprofilen über I/O's oder Feldbus
- Oszillationsbetrieb
- Positionssollwerteingang 0 - 10 V
- Puls- und Richtungseingänge
- Antriebe als Master-Booster oder als Gantry koppelbar
- elektronische Kurvenscheibe zur Leitachse
- Streaming Mode für Bahnkurven
- Eingang für externen hochauflösenden Positionssensor
- parametrierbare Referenzfahrmodi
- Safe Torque Off (STO)
- EtherCAT, POWERLINK, PROFINET, SERCOS III, TCP/IP, Profibus-DP, CANOpen, DeviceNet
- kostenloses Parametriertool LinMot-Talk
- Controller passend zu Motor und Applikation vorparametriert

ParaPicker® Pick&Placer Download-Center
Prospekte und Datenblätter
> ParaPicker® PP02 Übersichtsprospekt
> ParaPicker® PP02-23 Datenblatt
> ParaPicker® PP02-37 Datenblatt
Applikationshinweise
VideoClips
> #26 - ParaPicker® PP02 Demonstration
> #08 - ParaPicker® Prototyp 2005 'So fing alles bei uns an!'
Für die mechanische Konstruktion
STEP-Dateien nur auf Anfrage!
Gerne legen wir Ihre Applikation vor Beginn
der Konstruktion kinematisch aus.
Sprechen Sie uns bitte an!
Für die elektrische Konstruktion
> siehe > Drives > LinMot® Download-Center
Softwaretools
> LinMot-Talk siehe > Positioniercontroller Download-Center
Montage, Wartung und EG-Richtlinien
> Montageanleitung, Wartungsanleitung u. EG-Einbauerklärung für PP02-23
> Montageanleitung, Wartungsanleitung u. EG-Einbauerklärung für PP02-23 (englisch)
> Montageanleitung, Wartungsanleitung u. EG-Einbauerklärung für PP02-37
> Montageanleitung, Wartungsanleitung u. EG-Einbauerklärung für PP02-37 (englisch)
Copyrights
Unsere Texte, Bilder, Grafiken und VideoClips sind nach internationalem Urheberrecht geschützte Werke!
Fremde Warenzeichen siehe unser Copyright!