Handling Produkte - der systemische Baukasten
2-achsige kartesische Handlings in X-Z- u. X-Y-Bauweise
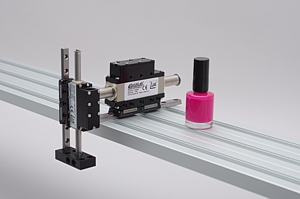
X-Z Pick&Place mit serieller Kinematik
Unsere kleinsten und einfachsten 2-achs Handling-Systeme
Performance:
- aus unserem QuickLab®-Baukasten zusammengestellt u. im System modular erweiterbar
- Taktzahlen bis ca. 120 min-1
- Arbeitsfläche 160 x 160 mm² (X x Z)
- Nutzlast ca. 500 Gramm
- einfache Steuerung mit SPS über Schrittkette
- Motorkabel kurzfristig in Längen nach Kundenwunsch lieferbar
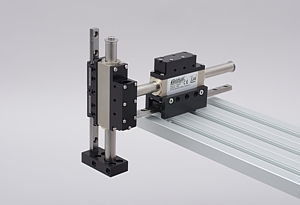
X-Z Pick&Place mit serieller Kinematik
Sehr kleine 2-achsige Handling-Systeme mit Gewichtskraft-Kompensation
Performance:
- aus unserem QuickLab®-Baukasten zusammengestellt u. im System modular erweiterbar
- Taktzahlen bis ca. 120 min-1
- Arbeitsfläche 160 x 160 mm² (X x Z)
- Nutzlast ca. 500 Gramm
- einfache Steuerung mit SPS über Schrittkette
- Motorkabel kurzfristig in Längen nach Kundenwunsch lieferbar
- Gewichtskraft-Kompensation
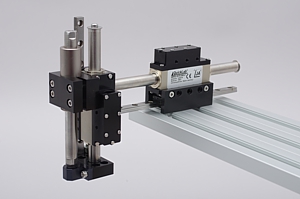
X-Z Flächenportal mit serieller Kinematik
Sehr kleine 2-achsige Flächenportale -
in der X-Achse bewegt sich der Stator
Performance:
- aus unserem QuickLab®-Baukasten zusammengestellt u. im System modular erweiterbar
- Taktzahlen bis ca. 120 min-1
- Arbeitsfläche 220 x 160 mm² (X x Z)
- Nutzlast ca. 500 Gramm
- einfache Steuerung mit SPS über Schrittkette
- Motorkabel kurzfristig in Längen nach Kundenwunsch lieferbar
- Gewichtskraft-Kompensation

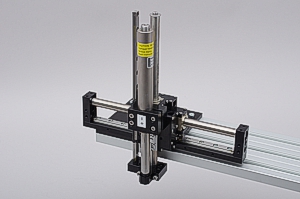
X-Y Flächenportal mit serieller Kinematik
Sehr kleine 2-achsige Flächenportale -
in der X-Achse bewegt sich der Läufer
Performance:
- aus unserem QuickLab®-Baukasten zusammengestellt u. im System modular erweiterbar
- Taktzahlen bis ca. 120 min-1
- Arbeitsfläche 220 x 160 mm² (X x Y)
- Nutzlast ca. 500 Gramm
- einfache Steuerung mit SPS über Schrittkette
- Motorkabel kurzfristig in Längen nach Kundenwunsch lieferbar

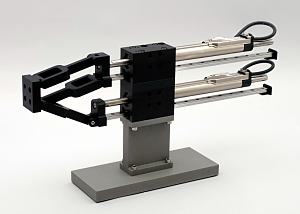
2-achsige kartesische Handlings in X-Z-Bauweise
X-Z Pick&Place mit serieller Kinematik
Kleine schnelle 2-achsige Handling Systeme
Unser Preiskracher - Three Triple Nine!
Performance:
- EUR 3.999,-- Einzelstückpreis für die rechts oben abgebildete Pick&Place-Ausrüstung (ohne Konsole)
- What You see is what You get - im Lieferumfang ist das abgebildete P&P-System, Beispielschaltplan, Not-Aus Konzept, PP-Controller vorparametriert u. Parametriersoftware
- aus unserem HighDynamic®-Baukasten zusammengestellt u. im System modular erweiterbar
- Taktzahlen bis ca. 120 min-1
- Arbeitsfläche 60 x 60 mm² (X x Z)
- Nutzlast 500 Gramm
- einfache Steuerung mit SPS über Schrittkette
- Motorkabel kurzfristig in Längen nach Kundenwunsch lieferbar
- Kabelschlepp mit integriertem Motorkabel optional
- Gewichtskraft-Kompensation optional


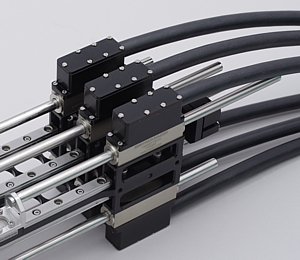
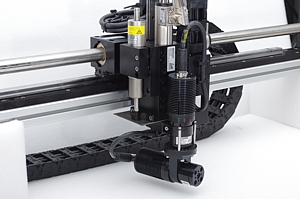
Sehr schnelle 2-achsige Handling Systeme
Performance:
- frei konfigurierbar mit standard Komponenten aus unserem HighDynamic®-Systembaukasten
- einfache Montage mit 4 Schrauben ohne Adapterplatte möglich
- Taktzahlen bis ca. 250 min-1
- max. Arbeitsfläche ca. 1.690 x 480 mm² (X x Z)
- kleine bis mittlere Nutzlasten
- einfache Steuerung
- C-Achse optional
- Motorkabel kurzfristig in Längen nach Kundenwunsch lieferbar
- Kabelschlepp optional
- Gewichtskraft-Kompensation bis 350 mm Hub optional
- pneumatisch betätigte Klemmvorrichtung optional (siehe Foto rechts Mitte)
- Abstreifer für rauhe Umgebungsbedingungen optional (siehe Foto rechts unten)
Typische Anwendungen:
|
|



X-U-Z Linienportal in Gantry Anordnung

Schnelles 2-achsiges Linienportal
Performance:
- mit Komponenten aus unserem HighDynamic®-Systembaukasten zusammengestellt
- Taktzahlen bis ca. 120 min-1
- max. Arbeitsfläche ca. 1.500 x 280 mm³
- Verbindung der X1- u. X2-Achse mittels zweifach drehbar gelagerter Traverse
- mittlere Nutzlasten
- einfache Steuerung
- C-Achse optional
- Gewichtskraft-Kompensation optional
Typische Anwendungen:
|
|
2-achsige kartesische Handlings in Z-X-Bauweise
Z-X Pick&Place mit serieller Kinematik
Kleine 2-achsige Handling Systeme mit großem X-Hub und sehr flachem X-Ausleger
Performance:
- mit Komponenten aus unserem QuickLab® und HighDynamic®-Systembaukästen zusammengestellt
- Taktzahlen bis ca. 120 min-1
- max. Arbeitsfläche ca. 220 x 100 mm² (X x Z)
- kleine Nutzlasten
- Ausleger der X-Achse nur 20 mm hoch
- keine bewegten Antriebskabel im Prozess
- Gewichtskraftkompensation
- einfache Steuerung
Typische Anwendungen:
|
|

Schnelle 2-achsige Handling Systeme mit großem X-Hub und sehr flachem X-Ausleger
Performance:
- mit Komponenten aus unserem HighDynamic®-Systembaukasten zusammengestellt
- Taktzahlen bis ca. 200 min-1
- max. Arbeitsfläche ca. 500 x 100 mm² (X x Z)
- mittlere Nutzlasten
- Ausleger der X-Achse nur 40 mm hoch
- keine bewegten Antriebskabel im Prozess
- Gewichtskraftkompensation
- einfache Steuerung
- Abstreifer für rauhe Umgebungsbedingungen optional
Typische Anwendungen:
|
|

2-achsige Handlings mit Parallelkinematik
X-Z Pick&Place mit ParaPicker® Technik
2-achsige Handling Systeme mit sehr schnellem Z-Hub
Performance:
- mit Komponenten aus unserem HighDynamic®-Systembaukasten zusammengestellt
- Taktzahlen bis ca. 280 min-1
- max. Arbeitsfläche ca. 280 x 150 mm² (X x Z)
- kleine Nutzlasten
- sehr schneller Z-Hub
- große Kraft in X-Richtung
- keine bewegten Antriebskabel
- Abstreifer für rauhe Umgebungsbedingungen optional
Typische Anwendungen:
|
|
Handlings mit 3 oder mehr Achsen in kartesischer Anordnung
X-Y-Z Flächenportal mit serieller Kinematik

3-achsige Handling Systeme mit Linearmotor-Modulen
Performance:
- mit Komponenten aus unserem HighDynamic®-Systembaukasten zusammengestellt
- einfache Montage mit 8 Schrauben ohne Adapterplatten
- Taktzahlen bis ca. 80 min-1
- max. Arbeitsraum ca. 330 x 280 x 180 mm³
- kleine bis mittlere Nutzlasten
- einfache Steuerung
- C-Achse optional
- Gewichtskraft-Kompensation optional
- Abstreifer für rauhe Umgebungsbedingungen optional
- niedrige Gesamtkosten
Typische Anwendungen:
|
|
X-Y-Z Flächenportal mit serieller Kinematik

3-achsige Handling Systeme mit Linearmotor-Achsen
und -Modulen
Performance:
- mit Komponenten aus unserem HighDynamic®-Systembaukasten zusammengestellt
- einfache Montage mit 8 Schrauben ohne Adapterplatten
- Taktzahlen bis ca. 100 min-1
- max. Arbeitsraum ca. 270 x 270 x 180 mm³
- kleine bis mittlere Nutzlasten
- einfache Steuerung
- C-Achse optional
- Gewichtskraft-Kompensation optional
- Abstreifer für rauhe Umgebungsbedingungen optional
- niedrige Gesamtkosten
Typische Anwendungen:
|
|
X-U-Y-Z Flächenportale in Gantry Anordnung

3-achsige Flächenhandlings mit Linearmotor-Achsen
und -Modulen
Performance:
- mit Komponenten aus unserem HighDynamic®-Systembaukasten zusammengestellt
- Taktzahlen bis ca. 100 min-1
- max. Arbeitsraum ca. 1.500 x 1.300 x 280 mm³
- mittlere Nutzlasten
- einfache Steuerung
- C-Achse optional
- Gewichtskraft-Kompensation optional
Typische Anwendungen:
|
|
3 oder mehrachsige Handlings mit Parallelkinematik
X-Y-Z-C Roboter mit ParaPicker® Technik

3- bzw. 4-achsige Handling Systeme
Performance:
- mit Komponenten aus unserem HighDynamic®-Systembaukasten zusammengestellt
- Taktzahlen bis ca. 400 min-1
- max. Arbeitsraum ca. 500 x 500 x 280 mm³
- kleine Nutzlasten
- sehr schneller X-Y-Hub
- große Kraft in Z-Richtung
- C-Achse unendlich drehend
- pneumatische Haltebremsen optional
Typische Anwendungen:
|
|
Multiachsen-Handlings für die Laborautomation
Multi-Achsen Systeme für die Laborautomation
Sehr leichte, kompakte und super schnelle
Handlingkombinationen
Performance:
- mit Komponenten aus unserem QuickDynamic®-Baukasten zusammengestellt
- sehr kompakte Anordnungen
- Hub bis 120 mm
- sehr dynamisch
- sehr leichte Ausführungen
Typische Anwendungen:
|
|
> Zur QickShaft® Produktseite
> Zur QuickDynamic® Produktseite
Hub-Drehhandlings
Z-C Hub-Drehmodul

Z-C-Schnelle Hub-Drehhandlings
Performance:
- mit Komponenten aus unserem HighDynamic® u. ForTorque® Systembaukasten zusammengestellt
- Z-Hub bis 330 mm
- C-Achse unendlich drehend
- freie Winkelpositionierung
- Gewichtskraft-Kompensation optional
Typische Anwendungen:
|
|
> Zur LinTorque® Produktseite
> Zur HighDynamic® Produktseite
> Zur ForTorque® Produktseite
Hub-Schwenk-Drehhandlings
Z-C-A Hub-Schwenk-Drehkombinationen

Schnelle Hub-Schwenk-Kombinationen
Produkteigenschaften:
- ForTorque® Drehmodule kombiniert mit HighDynamic® Linearmotor-Modul
- Anbausatz AD13 und AD15 für HM01, FT01-25 und FT01-45
X-Z-C-A Hub-Schwenk-Drehkombinationen
Robotik-Portal mit 2-achsiger Schwenkkombination aus dem MECHATRONICS- und SPECIALS-Baukasten!
Produkteigenschaften:
- mehrere ForTorque® Drehmodule kombiniert mit HighDynamic® Linearmotor-Achse und -Modul
Schnelle Handlings für Kraft-Weg überwachte Prozesse
Taktiles Positionieren - Aktuatoren mit Gefühl

Anwendungen:
- Fügen von Welle-Nabe-Verbindung
- Fügen von Sicherungsringen auf Wellen
- Fügen von Sicherungsstiften in Wellen
- Fügen von O-Ringen auf Wellen
- Testen von Federn
- Fügen von Elektronikbauteilen z.B. Sicherungen in Halter
- Fügen von Elektronikplatinen in Gehäuse
- Testen von Tastern
- Testen von Steckverbindern
- Schwingungstests
Applikationshinweise
> Taktiles Positionieren -
Kraft-Weg überwachte Produktionsprozesse
HighDynamic® Module mit Kraftaufnehmer

Kraftaufnehmer mit Anbausatz AD01
Produkteigenschaften:
- aus unserem HighDynamic®-Systembaukasten zusammengestellt
- passend zum DMS-Kraftaufnehmer U2B von HBM
- für HighDynamic® Module HM01-37 und HM01-48
Aktuator-Module mit Kraftaufnehmer und Sauger

Produkteigenschaften für ein kundenspezifisches Beispiel:
- dynamische Zug- und Druckprüfung
- max. Hub 90 mm
- max. Zug- bzw. Druckkraft 1.100 N
- Dauerzug- bzw. Dauerdruckkraft 510 N
- Kraftsensor zur exakten Kraftmessung und -regelung
- Wegsensor im Motor integriert
Handling Produkte Download-Center
Prospekte und Datenblätter
Applikationshinweise
> Taktiles Positionieren -
Kraft-Weg überwachte Produktionsprozesse
VideoClips
> #32 - X-Z-High Speed Pick&Place
> #49 - Z-X-High Speed Pick&Place
> #26 - ParaPicker® PP02 Demonstration
Für die mechanische Konstruktion
Für die elektrische Konstruktion
Softwaretools
Montage, Wartung und EG-Richtlinien
Copyrights
Unsere Texte, Bilder, Grafiken und VideoClips sind nach internationalem Urheberrecht geschützte Werke!
Fremde Warenzeichen siehe unser Copyright!