QuickShaft®
Übersicht

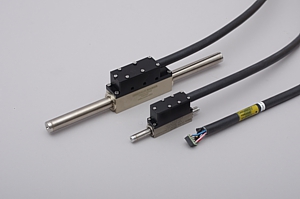
QuickShaft® sind hochdynamische miniaturisierte lineare Direktantriebe in tubularer eisenloser Bauart!
Sie sind das ideale Antriebselement für hochdynamische Applikationen im Bereich kleiner Hübe und kleiner Kräfte. Zu den Linearmotor-Antriebskomponenten bieten wir Führungssysteme, Positioniercontroller, Kabelsätze und Versorgungseinheiten als schlüsselfertige Lösungen an! Zur leichten Integration in Kundenapplikationen liefern wir Beispielschaltpläne, passend parametrierte Positioniercontroller, Not-Aus-Konzepte und kostenfrei Softwaretools.
QuickShaft® Servoantriebe
QuickShaft® sind direktangetriebene lineare, miniatur Servoantriebe in tubularer, eisenloser Bauweise!
Mit ihrem ausgezeichneten Leistungs-
Volumenverhältnis sind QuickShaft® Antriebe für solche Anwendungen besonders geeignet, bei denen Positionieraufgaben auf engstem Raum gelöst werden müssen!
Produkteigenschaften:
- dynamische elektromagnetische Direktlinearantriebe in tubularer, eisenloser Bauweise
- integriertes inkrementelles Wegmesssystem mit Abtastung der Antriebsmagnete
- Anschluss mit Ein-Kabel-Technologie und Stecker
- integrierte Gleitlager ohne Schmierung
- kein magnetisches Rasten (Cogging)
- Positionierwiederholgenauigkeit +/- 0,05 mm
- Spitzenkräfte bis 28 N
- max. Hub 120 mm
- Schutzart IP20
- sehr lange Lebensdauer
Lieferbare Optionen:
- Anschluss über Rundstecker Version 'B'
- Anschluss mit steckbarem direktem Kabelabgang Version 'Z' schlepptauglich bis 30 m
- konfektionierte Kabel

Faulhaber® Positioniercontroller in ELV-Technik

Bei einfachen Anwendungen und bei geringen dynamischen Anforderungen verwenden wir für unsere QuickShaft® Linearmotorsysteme Controller aus dem Faulhaber® Programm. Grundsätzlich werden die Controller passend zum Motor und zur Anwendung von uns vorparametriert geliefert. Kundenspezifische Ablaufprogramme können von uns programmiert werden.
Produkteigenschaften:
- sehr kompakt
- 24 VDC Versorgung
- 5 A Spitzenausgangsstrom
- frei progammierbar nach CiA 402
- 3 SPS-Eingänge, 2 SPS-Ausgänge, 2 Analogeingänge
- CANOpen, RS232, USB-PC-Schnittstelle
- kostenloses Parametriertool Motion Manager
- Controller passend zu Motor und Applikation vorparametriert
LinMot® Positioniercontroller in ELV-Technik

Bei dynamischen Anwendungen und für die Integration in Feldbussysteme verwenden wir für unsere QuickShaft® Linearmotorsysteme die Controller aus dem LinMot® Programm. Grundsätzlich werden die Controller passend zum Motor und zur Anwendung von uns vorparametriert geliefert.
Produkteigenschaften:
- 24 VDC Logikversorgung
- 48 - 72 VDC Leistungsversorgung
- 8 - 32 A Ausgangsstrom
- Anwahl von Positionieraufträgen mit frei definierbaren Verfahrprofilen über I/O's oder Feldbus
- Oszillationsbetrieb
- Positionssollwerteingang 0 - 10 V
- Puls- und Richtungseingänge
- Antriebe als Master-Booster oder als Gantry koppelbar
- elektronische Kurvenscheibe zur Leitachse
- Streaming Mode für Bahnkurven
- Eingang für externen hochauflösenden Positionssensor
- parametrierbare Referenzfahrmodi
- Safe Torque Off (STO)
- EtherCAT, POWERLINK, PROFINET, SERCOS III, TCP/IP, Profibus-DP, CANOpen, DeviceNet
- kostenloses Parametriertool LinMot-Talk
- Controller passend zu Motor und Applikation vorparametriert

Systemnetzteile u. Kabelsätze

Aus eigener Produktion bieten wir passende Systemnetzteile für die Leistungsversorgung aller LinMot® Controller an.
Konfektionierte steckfertige Kabelsätze komplettieren das Zubehörprogramm!
Produkteigenschaften:
NT01-Netzteilserie
- Trafonetzteile bis 450 W Dauerantriebsleistung
- einphasige oder 3-phasige Netzspeisung 230 VAC bzw. 400 VAC
- großzügig dimensionierter Zwischenkreiselko
NS01-Netzteilserie
- Schaltnetzteile bis 3 kW Dauerantriebsleistung
- Weitbereichseingang
- einphasige Netzspeisung mit aktiver Oberwellenfilterung
- alle verbauten Komponenten UL approbiert
Kabelsätze
- nicht schlepptaugliche Kabel
- schlepptaugliche Kabel
- robotertaugliche Kabel
Dienstleistungen und Engineering
Mit unserer langjährigen Erfahrung bei der Auslegung und dem Einsatz von Direktantrieben können wir zum Produkt umfassende Dienstleistungen und dazu ein erstklassiges und äußerst zeitnahes Engineering anbieten.
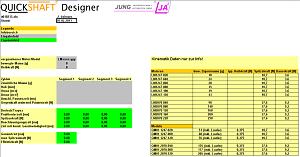
- Kinematikauslegung
- Antriebsauswahl
- Schulungen über lineare u. rotative Servoantriebstechnik (physikalisch technische Grundlagen und spezielle Anwendungen)
- Mechanik- und Elektroengineering
- Parametrierung, Programmierung u. Busanbindungen
- Inbetriebnahme u. Anlagenoptimierung
- komplette mechatronische Lösungen
QuickShaft® Download-Center
Prospekte und Datenblätter
> QuickShaft® und QuickDynamic® Übersichtsprospekt
> Linearmotoren Datenblatt
Applikationshinweise
> Erläuterungen zur Positioniergenauigkeit
> Taktiles Positionieren - Kraft-Weg überwachte Produktionsprozesse
VideoClips
> #29 - QuickDynamic® Module Demonstration
Für die mechanische Konstruktion
> Linearmotoren Maßblatt siehe Datenblatt
STEP-Dateien nur auf Anfrage!
Gerne legen wir Ihre Applikation vor Beginn
der Konstruktion kinematisch aus.
Sprechen Sie uns bitte an!
Für die elektrische Konstruktion
> Positioniercontroller
> Systemnetzteile
> Konfektionierte Kabel
> Beispielschaltpläne
> Sichere Maschinensteuerung
Softwaretools
> LinMot-Talk siehe > Positioniercontroller Download-Center
Montage, Wartung und EG-Richtlinien
> Montageanleitung, Wartungsanleitung u. EG-Konformitätserklärung für Linearmotoren
> Linearmotoren Montageanleitung, Wartungsanleitung u. Konformitätserklärung (englisch)
> Controller Montageanleitungen u. Konformitätserklärungen werden bei der Installation von LinMot-Talk
entpackt und sind nach Start von LinMot-Talk unter dem Reiter 'Handbücher' zu finden
Copyrights
Unsere Texte, Bilder, Grafiken und VideoClips sind nach internationalem Urheberrecht geschützte Werke!
Fremde Warenzeichen siehe unser Copyright!