QuickLab® Linearmotor-Module u. -Achsen
Übersicht
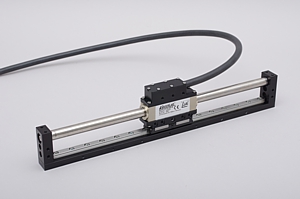
QuickLab® ist ein Baukastensystem, das aus dynamischen miniaturisierten Linearmotor-Modulen und Linearmotor-Achsen besteht.
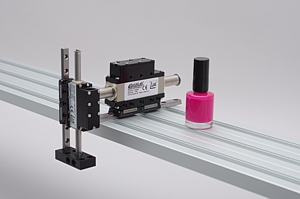
Mit unserer QuickLab®-Serie bieten wir ein modulares System an, das in Anwendungen unter IP20-Bedingungen eingesetzt werden kann. Mit einer Baubreite von nur 18 mm bzw. 22 mm deckt es den Bedarf an miniaturisierten 1-achsigen und mehrachsigen Handhabungssystemen ab.
QuickLab® Module und Achsen sind mit Präzisions-führungen ausgestattet, die Verfahrgeschwindigkeiten bis 3 m/s und Beschleunigungen bis 50 m/s² erlauben. Die Positionierwiederholgenauigkeit liegt bei +/- 50 Mikrometer.
Neu ist der steckbare und sehr kompakte Kabelabgang direkt auf schlepptaugliches Motorkabel. Die Motorkabel sind bis zu einer Länge von 30 m verfügbar.
Typische Anwendungen finden sich in der Laborautomation, in der Montageautomation, in der Prüftechnik und in der optischen u. pharmazeutischen Industrie.
Typische Anwendungen:
|
|

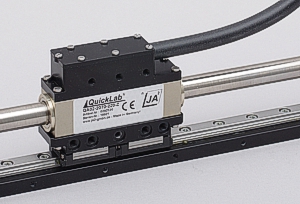
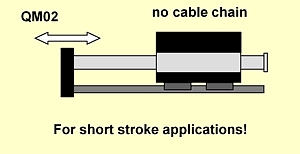
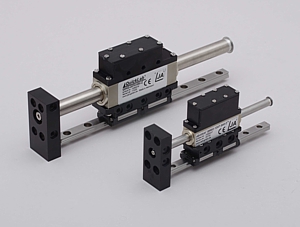
QuickLab® Linearmotor-Module QM02
Produkteigenschaften:
- zwei Baugrößen
- ideal für Kurzhubanwendungen und Zweiachslösungen
- ultraschmale u. verdrehsteife Konstruktion,
- nur 18 mm bzw. 22 mm breit
- QuickShaft® lineare Servoantriebstechnik integriert
- sehr kleine bewegte Massen
- Hübe bis 160 mm
- Spitzenkräfte bis 28 N
- Vorschubgeschwindigkeit bis 3 m/s
- max. Beschleunigung bis 50 m/s²
- Wiederholgenauigkeit +/- 0,05 mm
- hohe Laufleistung
- direkter Kabelabgang mit steckbarem schlepptauglichem Kabel
- Anschlusskabel bis 30 m Länge vorkonfektioniert
- konfektionierte Kabel anschluss- und steckerkompatibel zu LinMot®-Systemen
QuickLab® Linearmotor-Achsen QA02
Produkteigenschaften:
- ideale Grundachse bei P&P-Zweiachslösungen
- ultraschmale u. verdrehsteife Konstruktion
- nur 22 mm breit
- QuickShaft® lineare Servoantriebstechnik integriert
- sehr kleine bewegte Massen
- Hübe bis 220 mm
- Spitzenkräfte bis 28 N
- Vorschubgeschwindigkeit bis 3 m/s
- max. Beschleunigung bis 50 m/s²
- Wiederholgenauigkeit +/- 0,05 mm
- X-Y-Kombinationen ohne Zwischenplatte realisierbar
- hohe Laufleistung
- direkter Kabelabgang mit steckbarem u. schlepptauglichem Kabel
- Anschlusskabel bis 30 m Länge vorkonfektioniert
- konfektionierte Kabel anschluss- und steckerkompatibel zu LinMot®-Systemen

Faulhaber® Positioniercontroller in ELV-Technik

Bei einfachen Anwendungen und bei geringen dynamischen Anforderungen verwenden wir für unsere QuickShaft® Linearmotorsysteme Controller aus dem Faulhaber® Programm. Grundsätzlich werden die Controller passend zum Motor und zur Anwendung von uns vorparametriert geliefert. Kundenspezifische Ablaufprogramme können von uns programmiert werden.
Produkteigenschaften:
- sehr kompakt
- 24 VDC Versorgung
- 5 A Spitzenausgangsstrom
- frei progammierbar nach CiA 402
- 3 SPS-Eingänge, 2 SPS-Ausgänge, 2 Analogeingänge
- CANOpen, RS232, USB-PC-Schnittstelle
- kostenloses Parametriertool Motion Manager
- Controller passend zu Motor und Applikation vorparametriert
LinMot® Positioniercontroller in ELV-Technik

Bei dynamischen Anwendungen und für die Integration in Feldbussysteme verwenden wir für unsere QuickLab® Linearmotorsysteme die Controller aus dem LinMot® Programm. Grundsätzlich werden die Controller passend zum Motor und zur Anwendung von uns vorparametriert geliefert.
Produkteigenschaften:
- 24 VDC Logikversorgung
- 48 - 72 VDC Leistungsversorgung
- 8 - 32 A Ausgangsstrom
- Anwahl von Positionieraufträgen mit frei definierbaren Verfahrprofilen über I/O's oder Feldbus
- Oszillationsbetrieb
- Positionssollwerteingang 0 - 10 V
- Puls- und Richtungseingänge
- Antriebe als Master-Booster oder als Gantry koppelbar
- elektronische Kurvenscheibe zur Leitachse
- Streaming Mode für Bahnkurven
- Eingang für externen hochauflösenden Positionssensor
- parametrierbare Referenzfahrmodi
- Safe Torque Off (STO)
- EtherCAT, POWERLINK, PROFINET, SERCOS III, TCP/IP, Profibus-DP, CANOpen, DeviceNet
- kostenloses Parametriertool LinMot-Talk
- Controller passend zu Motor und Applikation vorparametriert

QuickLab® Download-Center
Prospekte und Datenblätter
> QuickDynamic® u. QuickShaft® Übersichtsprospekt
> QuickLab® QM02 Datenblatt
> QuickLab® QA02 Datenblatt
Applikationshinweise
> Erläuterungen zur Positioniergenauigkeit
> Taktiles Positionieren - Kraft-Weg überwachte Produktionsprozesse
VideoClips
Für die mechanische Konstruktion
STEP-Dateien nur auf Anfrage!
Gerne legen wir Ihre Applikation vor Beginn
der Konstruktion kinematisch aus.
Sprechen Sie uns bitte an!
Für die elektrische Konstruktion
> siehe > Drives > QuickShaft® Download-Center
> Sichere Maschinensteuerung
Softwaretools
> LinMot-Talk siehe > Positioniercontroller Download-Center
Montage, Wartung und EG-Richtlinien
> Montageanleitung, Wartungsanleitung u. EG-Einbauerklärung
Copyrights
Unsere Texte, Bilder, Grafiken und VideoClips sind nach internationalem Urheberrecht geschützte Werke!
Fremde Warenzeichen siehe unser Copyright!